手臂末端加入 components-gripper-suction pad 吸盤跟鍵盤控制 <<
Previous Next >> Python remote API 逆向運動學函式
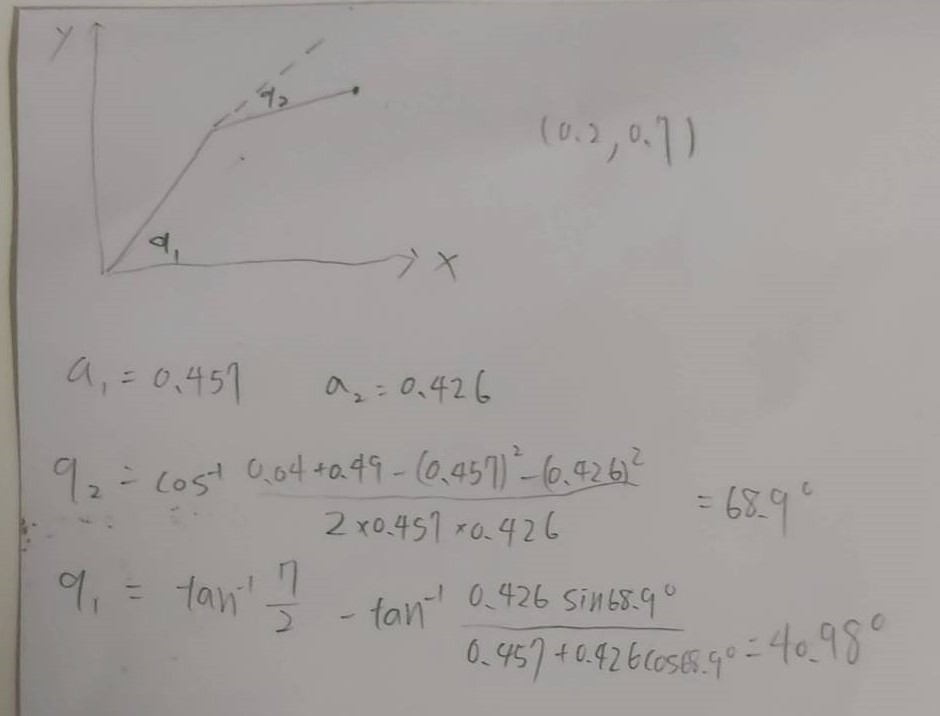
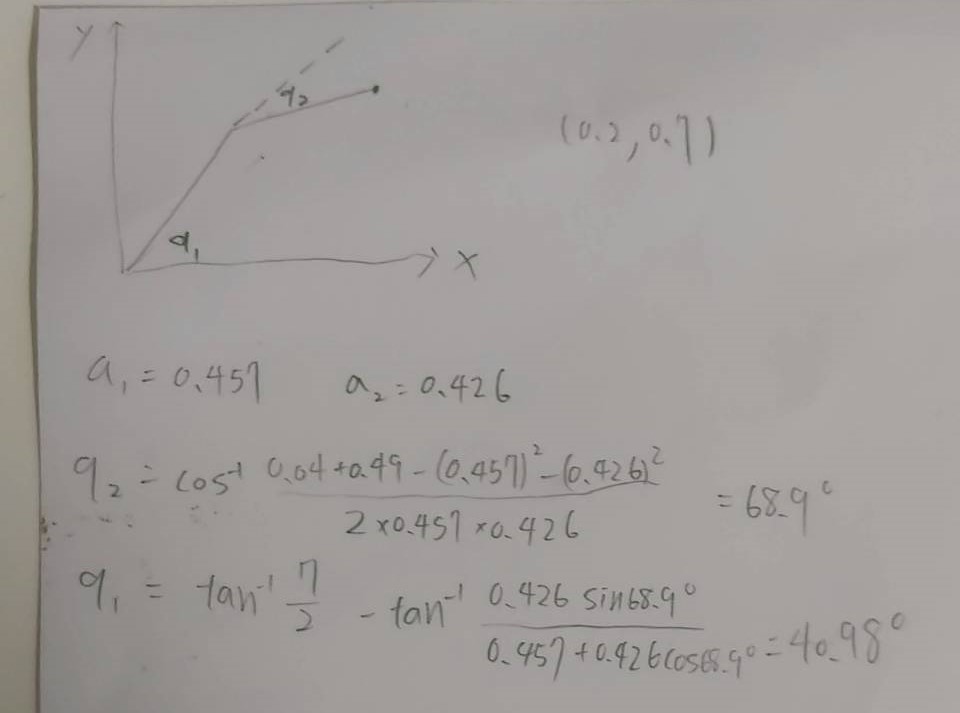
逆向運動學函式-鍵盤控制與程式迴圈方式
(0.2, 0.7, 0.05)
(-0.3, -0.55, 0.05)
鍵盤控制
Inverse Kinematics
迴圈方式
loap
重複執行取這兩個座標的方法
while sim.getSimulationState()~=sim.simulation_advancing_abouttostopre do
手臂末端加入 components-gripper-suction pad 吸盤跟鍵盤控制 <<
Previous Next >> Python remote API 逆向運動學函式